
(1)分析控製要求,將控製過程分成若幹個(ge) 工作步,明確各步的功能,弄清分支的結構(如單序列、選擇序列、並行序列),確定各步的轉換條件,將控製要求用功能圖表示出來。
(2)確定所需的I/O點數,選擇PLC機型,進行I/O分配。
(3)給每個(ge) 步分配一個(ge) 控製位。對於(yu) S7-200係列PLC,可以選擇順序控製繼電器S、內(nei) 部標誌位存儲(chu) 器M的位。
(4)根據順序功能圖,設計出梯形圖程序,最後根據某些特殊要求,添加部分控製程序。
【例7-6】完成圖7-20所示的某組合機床動力頭進給運動的控製程序設計。
(1)程序設計過程:
①繪製順序功能圖,如圖7-21所示。
②進行I/O分配,見表7-9。根據輸入需要4點,輸出需要3點,可以選擇S7 CPU221 AC/DC/繼電器型PLC。
③給每步分配輔助繼電器。初始步的輔助繼電器為(wei) M0.0,第1步的輔助繼電器為(wei) M0.1,第2步的輔助繼電器為(wei) M0.2,第3步的輔助繼電器為(wei) M0.3。
表7-9 動力頭控製係統的I/O分配表
④根據順序功能圖,畫出梯形圖,如圖7-26所示。
圖7-26 動力頭控製的梯形圖
(2)梯形圖工作過程分析:
①初始步動力頭在原位等待,係統上電時激活初始步,輔助繼電器M0.1~M0.3均不得電。
②第1步是係統快進步。在初始步M0.0激活的情況下,按啟動按鈕後,該步就成為(wei) 活動步。
③第2步是係統工進步。在第1步正在執行(M0.1為(wei) “ON”)的條件下,壓下限位開關(guan) SQ1,該步變成活動步。
④第3步是係統快退步。在第2步正在執行(M0.2為(wei) “ON”)的條件下,壓下限位開關(guan) SQ2,該步變成活動步。該步的關(guan) 斷條件為(wei) 退回原位,壓下SQ3。該步為(wei) 係統最後一步,當關(guan) 斷條件滿足時,回到初始狀態。
在工業(ye) 自動化生產(chan) 中.無論是自動化單機還是組合機床以及自動化生產(chan) 線,經常要用到機械手,以完成工件的取放。對於(yu) 片狀材料,所謂“手”,既可以是真空吸盤,也可以是電磁鐵;對於(yu) 棒形等材料,“手”既可以是夾鉗,也可以是夾具。對機械手的控製主要是位置識別、運動方向控製以及對物料是否存在的判別。
圖7-27 機械手控製圖
【例7-7】某機械手的結構和工作過程如圖7-27所示。它的任務是將A工作台的工件搬運到B工作台上。機械手是由能提供上下、左右運動的機械組成,上下與(yu) 左右運動分別由雙線圈兩(liang) 位電磁閥驅動氣缸來實現。一旦某個(ge) 方向電磁閥得電,機械手沿相應方向運動。當該方向電磁閥失電,機械手保持當前位置直至另一方向電磁閥得電為(wei) 止。放鬆/夾緊是由一個(ge) 單線圈兩(liang) 位電磁閥驅動氣缸來實現的。當線圈得電時即為(wei) 夾緊,失電時即為(wei) 放鬆。由於(yu) 夾緊操作中不使用限位開關(guan) ,因此,當夾緊電磁閥得電後,就啟動定時器計時,持續一定時間即認定為(wei) 已經夾緊。同樣,放鬆操作也是由定時器控製實現的。現要求完成PLC用於(yu) 機械手控製的程序設計。機械手的工作過程如下:
(1)機械手位於(yu) 初始位置(壓合SQ2、SQ4)時,按下啟動按鈕SB,下降電磁閥YV1得電,機械手下降直至壓合SQ1為(wei) 止。
(2)夾緊電磁閥YV2得電,同時啟動定時器,2.3s後工件夾緊。
(3)上升電磁閥YV3得電,機械手抓起工件上升,直至壓合SQ2為(wei) 止。
(4)機械手右移電磁閥YV4得電,機械手右移直至壓合SQ3。
(5)YV1得電,機械手下降直至壓合SQ1。
(6)夾緊電磁閥YV2失電,放工件到B台,2s後認定已放鬆。
(7)YV3得電,機械手上升,直至壓合SQ2。
(8)機械手向左電磁閥YV5得電,機械手左移,直至壓合SQ4,機械手回到原點,完成一個(ge) 循環。
下麵根據上述要求設計機械手控製的PLC程序。
(1)根據控製要求,畫出順序功能圖,如圖7-28所示,控製過程為(wei) 單一順序過程。
(2)進行I/O分配,如表7-10所示。根據輸入5點、輸出5點,選擇S7 CPU222 AC/DC/繼電器型。
(3)根據順序功能圖,畫出梯形圖,如圖7-29所示。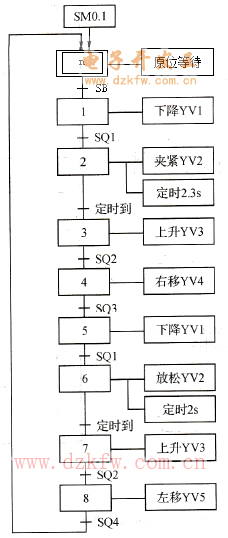
圖7-28 機械手控製順序功能圖
圖7-29 機械手控製梯形圖程序
表7-10 機械手控製的I/O分配

 返回頂部
返回頂部 刷新頁麵
刷新頁麵 下到頁底
下到頁底