
S7-200 有兩個 置PTO/PWM 發生器,用以建立高速脈衝串(PTO)或脈寬調節(PWM) 信號波形。
當組態一個輸出為PTO 操作時,生成一個50%占空比脈衝串用於步進電機或伺服電機的速度和位置的開環控製。置PTO功能提供了脈衝串輸出,脈衝周期和數量可由用戶控製。但應用程序必須通過plc內置I/O 提供方向和限位控製。
為了簡化用戶應用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向導可以幫助您在幾分鍾內全部完成PWM,PTO或位控模塊的組態。向導可以生成位置指令,用戶可以用這些指令在其應用程序中為速度和位置提供動態控製。
2、開環位控用於步進電機或伺服電機的基本信息
借助位控向導組態PTO 輸出時,需要用戶提供一些基本信息,逐項介紹如下:
⑴ 最大速度 (MAX_SPEED)和啟動/停止速度 (SS_SPEED)
圖1是這2 個概念的示意圖。
MAX_SPEED是允許的操作速度的最大值,它應在電機力矩能力的範圍。驅動負載所需的力矩由摩擦力、慣性以及加速/減速時間決定。
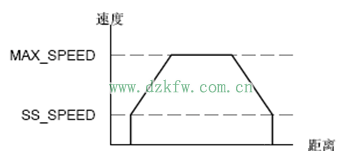
圖1 最大速度和啟動/停止速度示意
SS_SPEED:該數值應滿足電機在低速時驅動負載的能力,如果SS_SPEED的數值過低,電機和負載在運動的開始和結束時可能會(hui) 搖擺或顫動。如果SS_SPEED的數值過高,電機會(hui) 在啟動時丟(diu) 失脈衝(chong) ,並且負載在試圖停止時會(hui) 使電機超速。通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和減速時間
加速時間ACCEL_TIME:電機從(cong) SS_SPEED速度加速到MAX_SPEED速度所需的時間。
減速時間DECEL_TIME:電機從(cong) MAX_SPEED速度減速到SS_SPEED速度所需要的時間。
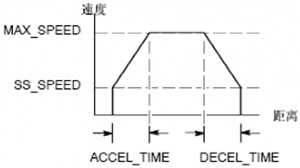
圖2 加速和減速時間
加速時間和減速時間的缺省設置都是1000毫秒。通常電機可在小於(yu) 1000 毫秒的時間工作。參見圖2。這2個(ge) 值設定時要以毫秒為(wei) 單位。
注意:電機的加速和失速時間要過測試來確定。開始時,您應輸入一個(ge) 較大的值。逐漸減少這個(ge) 時間值直至電機開始失速,從(cong) 而優(you) 化您應用中的這些設置。
⑶移動包絡
一個(ge) 包絡是一個(ge) 預先定義(yi) 的移動描述,它包括一個(ge) 或多個(ge) 速度,影響著從(cong) 起點到終點的移動。一個(ge) 包絡由多段組成,每段包含一個(ge) 達到目標速度的加速/減速過程和以目標速度勻速運行的一串固定數量的脈衝(chong) 。位控向導提供移動包絡定義(yi) 界麵,在這裏,您可以為(wei) 您的應用程序定義(yi) 每一個(ge) 移動包絡。PTO 支持最大100 個(ge) 包絡。
定義(yi) 一個(ge) 包絡,包括如下幾點:①選擇操作模式;②為(wei) 包絡的各步定義(yi) 指標。③為(wei) 包絡定義(yi) 一個(ge) 符號名。
⑴選擇包絡的操作模式:
PTO支持相對位置和單一速度的續轉動,如圖3所示,相對位置模式指的是運動的終點位置是從(cong) 起點側(ce) 開始計算的脈衝(chong) 數量。單速續轉動則不需要提供終點位置,PTO一直持續輸出脈衝(chong) ,直至有其他命令發出,例如到達原點要求停發脈衝(chong) 。
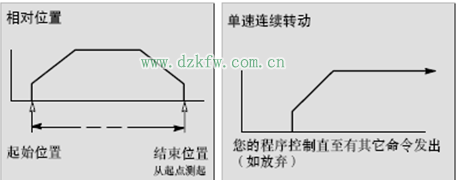
圖3 一個(ge) 包絡的操作模式
⑵包絡中的步
一個(ge) 步是工件運動的一個(ge) 固定距離,包括加速和減速時間 的距離。PTO 每一包絡最大允許29 個(ge) 步。
每一步包括目標速度和結束位置或脈衝(chong) 數目等幾個(ge) 指標。圖4 所示為(wei) 一步、兩(liang) 步、三步和四步包絡。注意一步包絡隻有一個(ge) 常速段,兩(liang) 步包絡有兩(liang) 個(ge) 常速段,依次類推。步的數目與(yu) 包絡中常速段的數目一致。
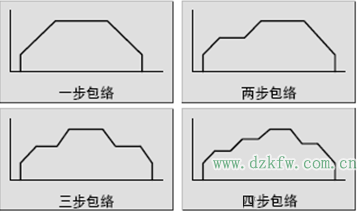
圖4 包絡的步數示意
3、使用位控向導編程
STEP7 V4.0 軟件的位控向導能自動處理PTO脈衝(chong) 的單段管線和多段管線、脈寬調
製、SM 位置配置和創建包絡表。
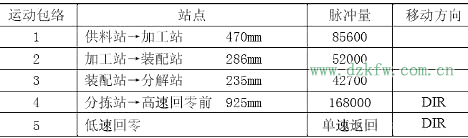
本節將給出一個(ge) 在YL-335A 上實現的簡單工作任務例子,闡述使用位控向導編程的方法和步驟。表1 是YL-335A 上實現步進電機運行所需的運動包絡。
表1 步進電機運行的運動包絡
1、使用位控向導編程的步驟如下:
1)為(wei) S7--200 PLC選擇選項組態 置PTO/PWM操作。
在STEP7 V4.0軟件命令菜單中選擇工具→位置控製向導並選擇配置S7-200PLC內(nei)
置PTO/PWM操作,如圖5所示。
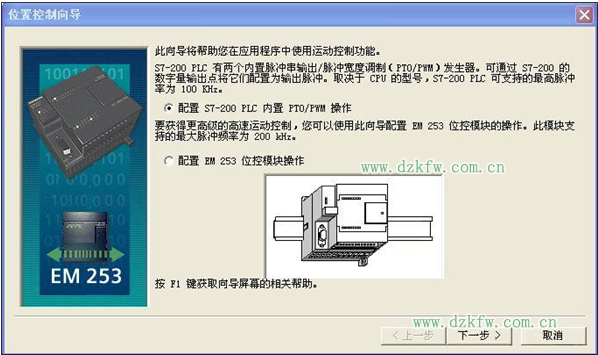
圖5 位控向導啟動界麵
2)單擊“下一步”選擇“QO.0”,再單擊“下一步”選擇“線性脈衝(chong) 輸出 PTO)”
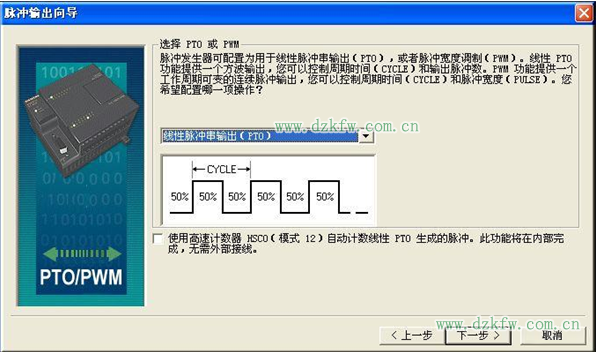
圖5 選擇PTO或PWM界麵
3)單擊“下一步”後,在對應的編輯框中輸入MAX_SPEED 和SS_SPEED 速度值。輸入最高電機速度“90000”,把電機啟動/停止速度設定為(wei) “600”。這時,如果單擊MIN_SPEED值對應的灰色框,可以發現,MIN_SPEED值改為(wei) 600,注意:MIN_SPEED值由計算得出。用戶不能在此域中輸入其他數值。
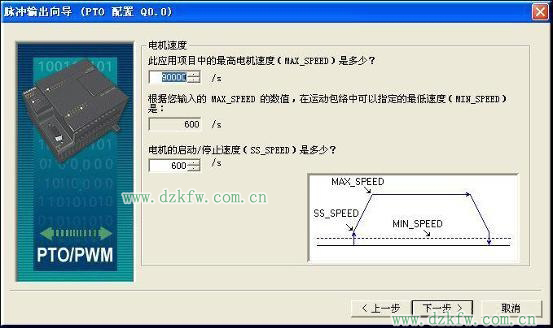
圖6
4)單擊“下一步”填寫(xie) 電機加速時間“1500”和電機減速時間 “200”
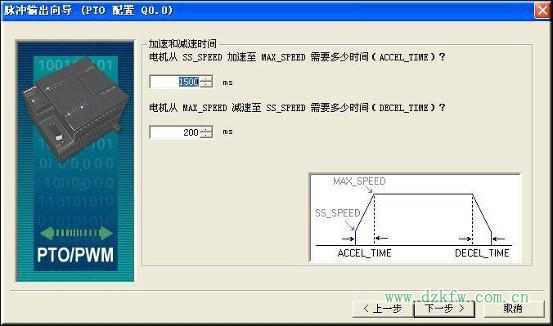
圖7 設定加速和減速時間
5)接下來一步是配置運動包絡界麵,見圖8。
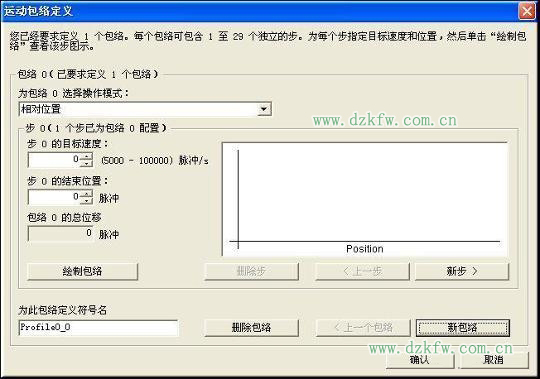
圖8 配置運動包絡界麵
該界麵要求設定操作模式、1個(ge) 步的目標速度、結束位置等步的指標,以及定義(yi) 這一包絡的符號名。(從(cong) 第0個(ge) 包絡第0步開始)
在操作模式選項中選擇相對位置控製,填寫(xie) 包絡“0”中數據目標速度“60000”,結束位置“85600”,點擊“繪製包絡”,如圖9所示,注意,這個(ge) 包絡隻有1步。包絡的符號名按默認定義(yi) 。這樣,第0個(ge) 包絡的設置,即從(cong) 供料站→加工站的運動包絡設置就完成了。現在可以設置下一個(ge) 包絡。

圖9 設置第0個(ge) 包絡
點擊“新包絡”,按上述方法將下表中上3個(ge) 位置數據輸入包絡中去。

表中最後一行低速回零,是單速連續運行模式,選擇這種操作模式後,在所出現的界麵中(見圖10),寫(xie) 入目標速度“20000”。界麵中還有一個(ge) 包絡停止操作選項,是當停止信號輸入時再向運動方向按設定的脈衝(chong) 數走完停止,在本係統不使用。
6)運動包絡編寫(xie) 完成單擊“確認”,向導會(hui) 要求為(wei) 運動包絡指定V存儲(chu) 區地址(建議地址為(wei) VB75~VB300),默認這一建議,單擊“下一步”出現圖11,單擊 “完成”。
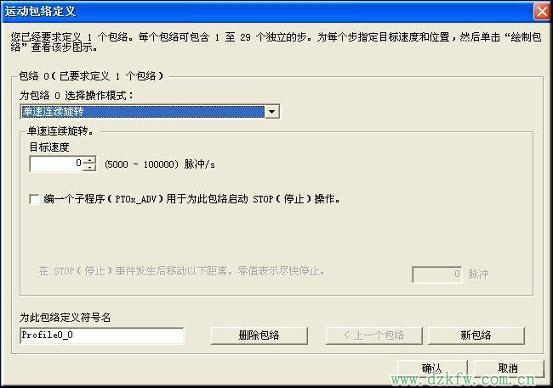
圖11 生成項目組件提示
2、項目組件
運動包絡組態完成後,向導會(hui) 為(wei) 所選的配置生成三個(ge) 項目組件(子程序),分別是:PTOx_RUN子程序(運行包絡),PTOx_CTRL子程序(控製)和PTOx_MAN子程序(手動模式)子程序。一個(ge) 由向導產(chan) 生的子程序就可以在程序中調用如圖12所示。
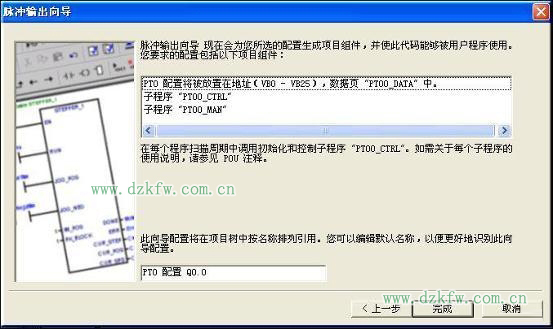
圖12 三個(ge) 項目組件
它們(men) 的功能分述如下:
⑴ PTOx_RUN子程序(運行包絡):命令 PLC 執行存儲(chu) 於(yu) 配置/包絡表的特定包絡中的運動操作。運行這一子程序的梯形圖如圖13所示。
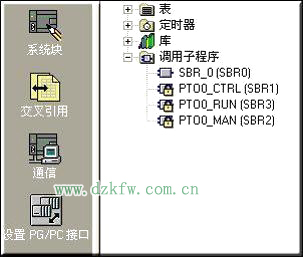
圖13 運行PTOx_RUN子程序
EN位:啟用此子程序的使能位。
START參數:包絡的執行的啟動信號。對於(yu) 在START參數已開啟且PTO當前不活動時的每次掃描,此子程序會(hui) 激活PTO。為(wei) 了確保僅(jin) 發送一個(ge) 命令,請使用上升緣以脈衝(chong) 方式開啟START參數。
Profile(包絡)參數:包含為(wei) 此運動包絡指定的編號或符號名。
Abort(終止)參數命令,開啟時位控模塊停止當前包絡並減速至電機停止。
Done(完成)參數:當模塊完成本子程序時,此參數 ON。
Error(錯誤)參數:包含本子程序的結果。
C_Profile參數:包含位控模塊當前執行的包絡。
C_Step參數:包含目前正在執行的包絡步驟。
⑵ PTOx_CTRL子程序:(控製)啟用和初始化與(yu) 步進電機或伺服電機合用的PTO輸出。請在用戶程序中隻使用一次,並且請確定在每次掃描時得到執行。即始終使用SM0.0作為(wei) EN的輸入,如圖14所示。
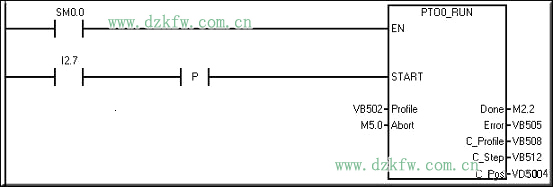
圖14 運行PTOx_CTRL子程序
I_STOP(立即停止)輸入:開關(guan) 量輸入。當此輸入為(wei) 低時,PTO功能會(hui) 正常工作。當此輸入變為(wei) 高時,PTO立即終止脈衝(chong) 的發出。
D_STOP(減速停止)輸入:開關(guan) 量輸入。當此輸入為(wei) 低時,PTO功能會(hui) 正常工作。當此輸入變為(wei) 高時,PTO會(hui) 產(chan) 生將電機減速至停止的脈衝(chong) 串。“完成”輸出:開關(guan) 量輸出。當“完成”位被設置為(wei) 高時,它表明上一個(ge) 指令也已執行。
Error(錯誤)參數:包含本子程序的結果。當“完成”位為(wei) 高時,錯誤字節會(hui) 報告無錯誤或有錯誤代碼的正常完成。如果PTO向導的HSC計數器功能已啟用,C_Pos參數包含用脈衝(chong) 數目表示的模塊;否則此數值始終為(wei) 零。
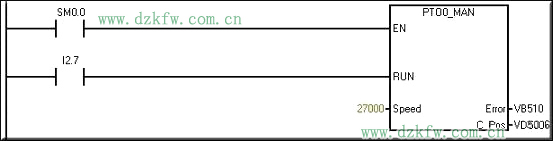
⑶ PTOx_MAN子程序(手動模式):將PTO輸出置於(yu) 手動模式。這允許電機啟動、停止和按不同的速度運行。當PTOx_MAN子程序已啟用時,任何其他PTO子程序都無法執行。運行這一子程序的梯形圖如圖15所示。
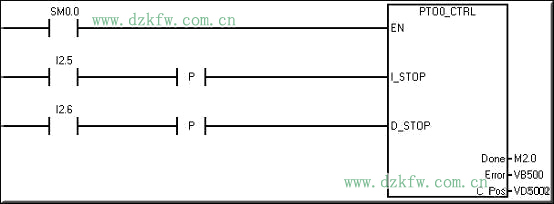
圖15 運行PTOx_MAN子程序
RUN(運行/停止)參數:命令PTO加速至指定速度(Speed(速度)參數)。您可以在電機運行中更改Speed參數的數值。停用RUN參數命令PTO減速至電機停止。當RUN已啟用時,Speed參數確定著速度。速度是一個(ge) 用每秒脈衝(chong) 數計算的DINT(雙整數)值。您可以在電機運行中更改此參數。
Error(錯誤)參數包含本子程序的結果。
如果PTO向導的HSC計數器功能已啟用,C_Pos參數包含用脈衝(chong) 數目表示的模塊;否則此數值始終為(wei) 零。
注:
脈衝(chong) 速率是指每秒發多少個(ge) 脈衝(chong) ,用來控製電機速度
脈衝(chong) 數量是指一共發的脈衝(chong) 個(ge) 數,用來控製電機行程
脈衝(chong) 速率X時間=脈衝(chong) 數量
電機速度X時間=電機行程
 返回頂部
返回頂部 刷新頁麵
刷新頁麵 下到頁底
下到頁底