
遙控電路分為(wei) 兩(liang) 部分:發射部分和接收部分。
1、發射部分:紅外遙控發射器由鍵盤矩陣、遙控專(zhuan) 用集成電路、驅動電路和紅外發光二極管三部分電路組成,結構如下圖所示。
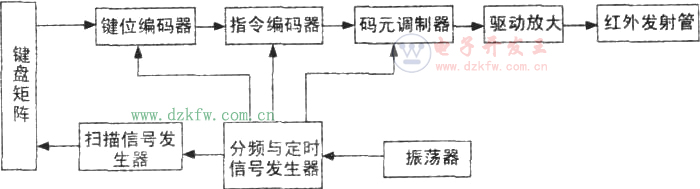
當有鍵按下時,係統延時一段時間(防止幹擾),然後啟動振蕩器,鍵編碼器取得鍵碼然後從(cong) ROM中取得相應的指令代碼(由0和1組成的代碼),遙控器一般采用電池供電,為(wei) 了節省電量和提高抗幹擾能力,指令代碼都是經32—56KHz範圍內(nei) 的載波的調製後輸出到放大電路,驅動紅外發射管發射出940nm的紅外光。當發送結束時振蕩器也關(guan) 閉,係統處於(yu) 低功耗休眠狀態
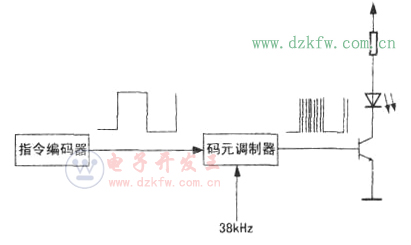
下圖是載波調製示意圖,載波的頻率調製頻率在不同的場合會(hui) 有不同,不過家用電器多采用的是38KHz的,也就是用455KHz的振蕩器經12分頻得到的。
現有的紅外遙控包括兩(liang) 種方式:
PWM(脈衝(chong) 寬度調製)和PPM(脈衝(chong) 位置調製)。兩(liang) 種形式編碼的代表分別為(wei) NEC和PHILIPS的RC-5。
PWM(脈衝(chong) 寬度調製):以發射紅不發射載波為(wei) “O”,從(cong) 不發射載波到發射載波為(wei) “1”,周期長度時一定的。
(1)NEC標準:
此標準下共有兩(liang) 種編碼,一種是全碼:引導碼+係統碼(8位)+係統碼的反碼+功能碼(8位)+功能碼反碼,另一種是簡碼=引導碼+結束位。
引導碼用來通知接收器其後為(wei) 遙控數據,係統碼用來區分是哪一機型的數據,接收端依此來判斷後續的數據是否為(wei) 須執行的指令。功能碼用來區分是哪一個(ge) 鍵被按下,接收端根據功能碼做出應該執行什麽(me) 動作的判斷。簡碼是在持續按鍵時發送的碼。它告知接收端,某鍵是在被連續地按著(最常見的就是音量和頻道的控製方式)。
為(wei) 了提高編碼的可靠性,NEC標準規定係統碼、功能碼後分別接著傳(chuan) 送其反碼,供誤碼校驗用。
在下圖中表示的就是一個(ge) 全碼,它的構成是:9ms的高電平和4.5ms的低電平組成的引導碼+碼值為(wei) 00000001的係統碼+係統碼的反碼11111110+碼值為(wei) 00011100的功能碼+功能碼的反碼11100011。(注意紅外遙控是先輸出低位的)當某鍵的按鍵時間超過108ms時就會(hui) 輸出簡碼,直到釋放此鍵。
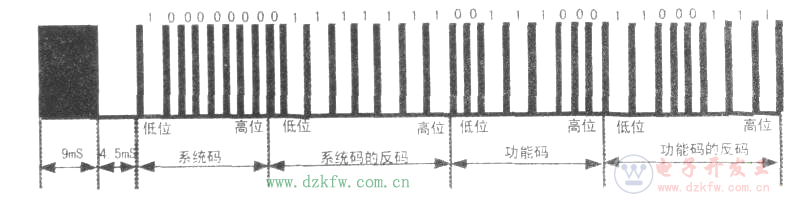
uPD6121在455kHz振蕩器下的,不同的芯片會(hui) 有不同。
(2)PHILIPS的RC-5標準:
此標準下沒有簡碼,一個(ge) 全碼=起始碼’11’+控製碼(1位)+係統碼(5位)+功能碼(6位),當點按時,控製碼在O和1之間切換,如果長按,則控製碼不變,一直發送全碼。
下圖中的全碼構成是:兩(liang) 位起始碼11+控製碼0+5位係統碼01010+6位功能碼011001。(注意此標準下高位先輸出),當再次按動此鍵時控製碼變為(wei) 1,其他不變。
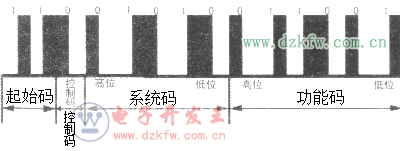
圖中的時間和編碼是以SAA3010在455kHz振蕩器下的。
2、接收部分:
接收部分是由下圖幾個(ge) 部分組成的,但在實際應用中,圖中所有電路都集成在一個(ge) 電路中,也就是我們(men) 常說的一體(ti) 化紅外接收頭,一體(ti) 化接收頭按載波頻率不同,型號也不一樣,購買(mai) 時需加注意。還有一點需要注意的就是,由於(yu) 與(yu) CPU接口的問題,大部分接收電路都是反碼輸出的,也就是說當沒有紅外信號時輸出為(wei) 1.有信號時輸出為(wei) 0。

 返回頂部
返回頂部 刷新頁麵
刷新頁麵 下到頁底
下到頁底